Auto-Miner
A downloadable game for Windows
Explore an endlessly-growing network of caves and tunnels, mining them for various gems. Except you don't do the mining. You make an army of robots do that for you.
As you achieve certain milestones, more options will be available for purchase to upgrade your robots. This will allow you to modify their behavior to hopefully dig more efficiently and get gems more quickly.
Made for PROCJAM 2020, a game jam about procedural content generation.
Download
Click download now to get access to the following files:
Development log
- Auto-Miner now playable!Dec 15, 2020




Comments
Log in with itch.io to leave a comment.
I love this game pls fix some of the bugs though also if you update it you could make the trails on the bots be able to change color or let you name them
I found a couple of errors with the cave generation systems.
There are some errors with the bots as well
- The tracers do not function properly because of a rotation bug with the diggers. Occasionally, while moving to the next area, diggers rotate strangely. When they do this, the tracers seem to become shorter. Eventually, this makes tracers useless, as unequipping and reequipping does not fix it.
- I would recommend adding a third type of robot that cleans up the caves. I encountered parallel hallways that something should merge. Especially when they led to the same cave, it made the caves harder to navigate and causes the robots to favor those rooms.
A feature to save your game would be nice as well since I cannot complete a game in a single playthrough.Thanks for the feedback. Many of those are issues I'm aware of. I thought I had resolved the one-sided wall problem. I'll have to look into that one. The steep hallways can sometimes be navigated by jumping, but I guess it would be good to check the slope, and if it's too steep just dead end instead. I'm checking for collisions to keep hallways from overlapping, but I might have forgotten to resolve the turned hallways correctly (with two segments that connect to existing rooms), and that might be causing that problem.
I'm not sure I've seen the tracer problem you mentioned. I know if it gets stuck at dead ends in the room for a while, it'll keep returning to the center of the room, with the tracer path doing the same, but are you saying the path is shortening while the robot is stationary?
Cleaning up hallways might get messy, and could just lead to robots trying to dig in the same spots repeatedly, but I was thinking about having some different robot behaviors that "remember" previous rooms they've been in to favor new rooms instead, as another upgrade module.
And I would definitely like to get a save feature for the game, but I just didn't have time for it this week.
The issue with steepness is that some generate passages that are very steep but less than a fourth of a meter long in the x/y axis, creating a wall.
The issue with tracers occurs between the bot traveling to the room center and leaving the room center.
The cleaning bot I mentioned would remove walls thin enough to be considered dividers. I forgot to mention that they would function similar to the item you mentioned, marking walls for the bot to avoid or priotize. Additionally, they would also destroy dead ends and merge paths and walls if reasonable.
This is very cool! I like that you can explore and upgrade your bots. Do you generate each cave and rewards in runtime?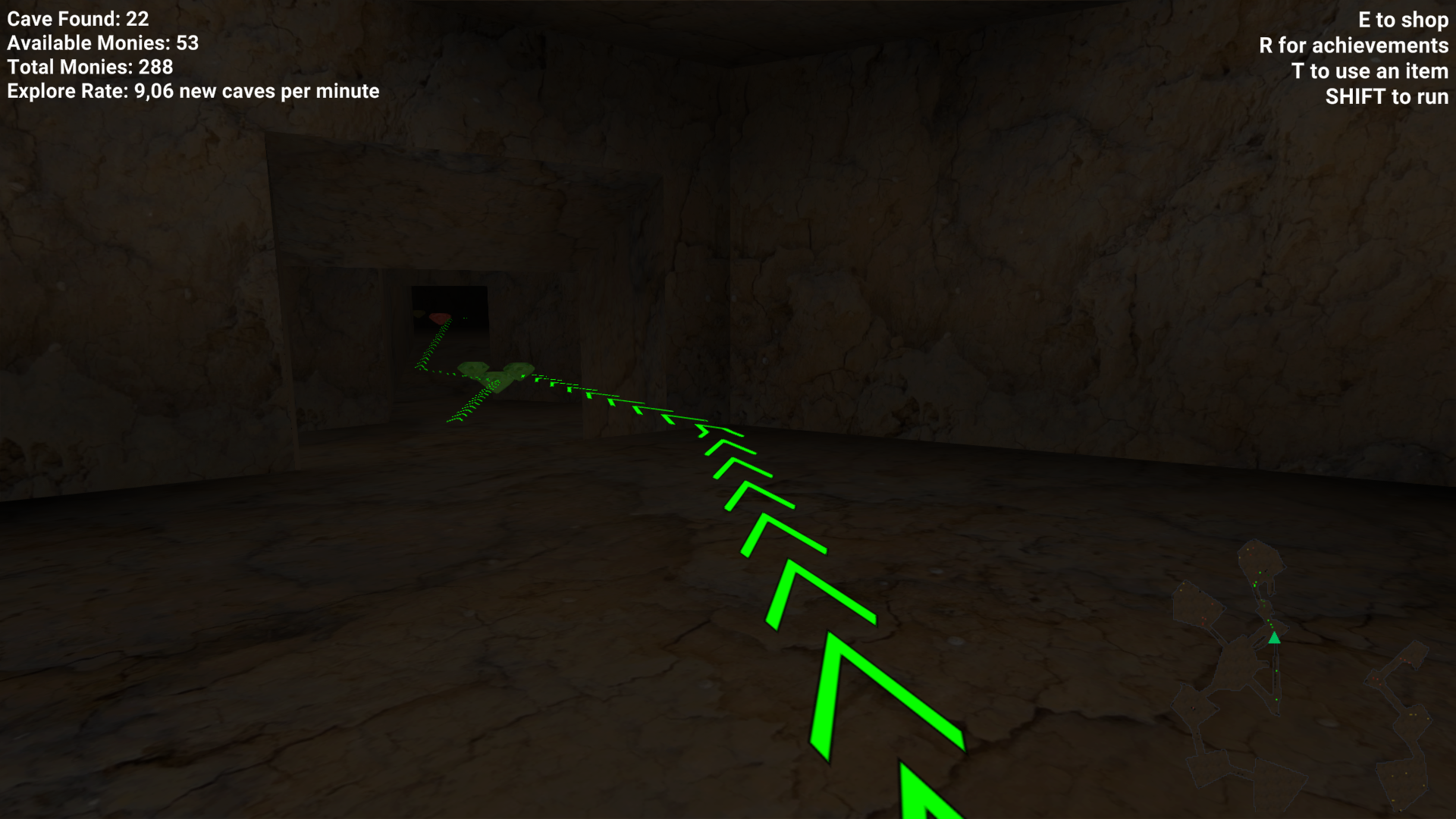
Yup, all the geometry and gems are generated at runtime. (The shop inventory is not though). The number of gems is based on the size of the room, and the value is decided by a perlin noise lookup, meaning that if you start to find higher value gems, it's good to keep digging in that direction, because it is a gradient, and the value may continue to get higher if you keep going.
The room shapes are made by rotating a random amount around a center point and then offsetting by a random distance from the center to create the corners. When the robot digs, it picks a random slope and distance to dig. It then checks if there is an existing room in that direction. If so, it tries to connect to it. Otherwise, it builds a new room. As a failsafe, if it cannot connect to the room or if anything gets in the way, it will just try to go forward with the tunnel until it hits something, and then stops as a dead end.